Google DeepMind 推出基于 Gemini 2.0 研发的新一代 机器人 AI 模型:Gemini Robotics和Gemini Robotics-ER,通过新增物理动作作为输出方式,使机器人能够直接执行任务。这种模型赋予机器人更强的适应性、交互性和灵活性,让它们能够处理广泛的现实世界任务。
🔍 本次发布的两个核心 AI 模型:
- Gemini Robotics —— 具备“视觉-语言-动作”(Vision-Language-Action, VLA)能力,可直接控制机器人执行任务
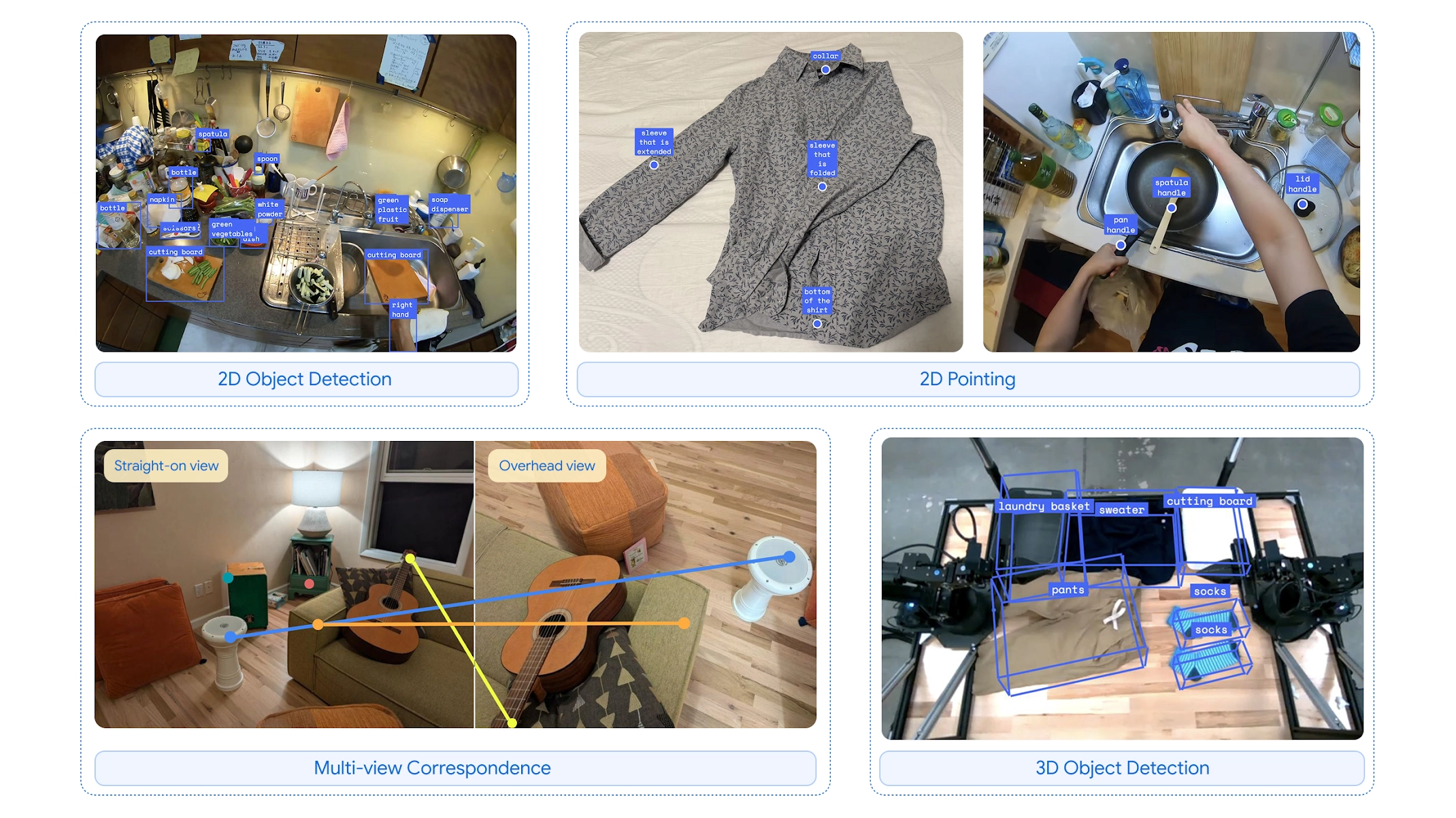
- Gemini Robotics-ER —— 具备 空间理解(Embodied Reasoning,ER具身推理),可帮助研究人员让机器人更好地适应真实环境
🚀 Gemini Robotics 的主要特性:
- 泛化能力:Gemini Robotics利用Gemini 2.0的世界理解能力,机器人能够处理未见过的新物体、新指令和新环境,甚至完成训练中未见过的新任务。在综合泛化基准测试中,Gemini Robotics的性能比其他最先进的VLA模型高出一倍以上。例如,它能完成未训练过的任务,如扣篮一个新篮球。
- 交互性:它能理解日常语言指令(包括不同语言),并快速响应环境或指令的变化。例如,当物体被移动时,它能迅速重新规划行动路径,无需额外输入即可继续任务。
- 灵活性与灵巧性:通过多模态推理(结合视觉、语言和动作),机器人能精确操控物体,完成多步骤任务。支持执行需要精细动作的复杂任务,如折叠纸鹤、将零食装进拉链袋或轻柔放置眼镜。
- 多形态适应:Gemini Robotics不仅限于特定机器人类型,它可以适配从双臂机器人平台(如ALOHA 2)到人形机器人(如Apptronik的Apollo)的多种形态。
Gemini Robotics:更智能的机器人 AI
🌍(1)通用性:能处理新情况、新环境
📌 特点:无需专门训练,即可适应新的任务、物体和环境
✅ 支持泛化推理:可以处理从未见过的任务
✅ 适应新物体和指令:能够理解新的指令和环境
✅ 性能大幅提升:在 通用性基准测试 中,性能比现有最先进的 VLA 模型高出 2 倍
💡 举例:
- 机器人可以识别从未见过的工具,并推断其用途
- 它可以根据环境变化调整行动,比如在厨房里找到不同类型的锅具
🤖(2)交互性:自然语言交流、动态调整
📌 特点:机器人能够与人类进行实时互动,并根据环境变化调整行为
✅ 语音 & 文字指令理解更强:可处理更复杂的日常对话
✅ 适应环境变化:能检测物体位置变化并调整策略
✅ 动态任务调整:即使物品掉落或任务变化,机器人也能快速重新规划
💡 举例:
- 你告诉机器人:“请帮我整理桌子。”
- 机器人可以分辨垃圾、书籍和电子产品,并将它们放到合适的地方
- 如果你改变指令,比如“把水杯放到架子上”,机器人会立刻调整行动
🎯(3)灵活性:精细操作能力(Dexterity)
📌 特点:具备更高的机械灵活性,能够执行更精细的操作
✅ 更复杂的任务执行能力:例如折纸、整理物品、组装零件
✅ 多步骤操作能力:可以完成多步骤的任务,比如 打开包装、倒水、摆放餐具
💡 举例:
- 机器人可以折叠一只精致的纸鹤 🦢
- 可以 打开食品包装,并把零食放进密封袋
- 可以 系鞋带 或 拼装家具
🦾(4)支持多种机器人硬件
📌 特点:可适配不同类型的机器人
✅ 兼容双臂机器人 ALOHA 2(研究实验室广泛使用)
✅ 支持 Franka 机械臂(学术界常见)
✅ 可集成到 Apptronik Apollo 等类人机器人中
💡 举例:
- 研究人员可以在不同机器人硬件上运行 Gemini Robotics,无需大幅改动
- 类人机器人 Apollo 可以执行复杂的工业任务,如 组装、搬运、物流配送
Gemini Robotics-ER:让机器人具备空间理解
除了Gemini Robotics,Google DeepMind还推出了Gemini Robotics-ER(Embodied Reasoning,具身推理)。这是一个专注于空间理解的视觉-语言模型,旨在帮助机器人专家将其与现有的低级控制器结合使用。它能让机器人更好地理解周围环境,例如识别物体及其可交互部分(如杯子的把手),并规划行动路径。
🔍 Gemini Robotics-ER 是增强版的 Gemini 机器人 AI,具备更强的空间感知能力。
📌 特点:
- 3D 物体检测 & 空间理解(更准确地感知物体位置)
- 智能路径规划(计算最佳路径,避免障碍物)
- 动作安全性评估(判断某个动作是否安全)
💡 举例:
- 机器人可以 理解如何正确抓取咖啡杯,并选择合适的角度和抓握方式
- 在仓库里,它可以 规划最优路线搬运货物
在家中,它可以 避开宠物、家具等障碍物,确保安全行动
机器人安全性:AI 如何确保安全?
🔍 Google DeepMind 采用多层安全策略,确保机器人不会做出危险动作
📌 核心安全措施:
✅ 物理安全:避免碰撞、控制机械臂力道
✅ 任务安全:防止机器人执行危险任务,如损坏物品、伤害人类
✅ 行为约束:基于 阿西莫夫机器人三定律,AI 遵循人类设定的规则
📢 Google DeepMind 还发布了新的安全数据集(ASIMOV 数据集),用于检测 AI 机器人在现实场景中的潜在风险。
5️⃣ 未来应用场景
🎯 工业制造:机器人可以完成 装配、包装、分拣
🏠 家庭助手:帮助整理家务、做饭、照顾老人和儿童
🚚 物流 & 仓储:优化 自动搬运、货物分拣
🏥 医疗护理:辅助护理人员照顾病人
🔗 合作伙伴:
- Apptronik(类人机器人 Apollo)
- Agile Robots、Agility Robotics、Boston Dynamics(机器人研究)
官网:https://deepmind.google/technologies/gemini-robotics/
介绍:https://deepmind.google/discover/blog/gemini-robotics-brings-ai-into-the-physical-world/
技术报告:https://storage.googleapis.com/deepmind-media/gemini-robotics/gemini_robotics_report.pdf