最近,杭州的科技公司群核科技再次引起了行业关注,因其开源的空间理解模型 SpatialLM 被谷歌在一篇论文中点名感谢。这个模型的创新之处在于,它能让机器人通过一段普通的视频理解物理世界的几何关系,标志着机器人训练领域的一次重大突破。
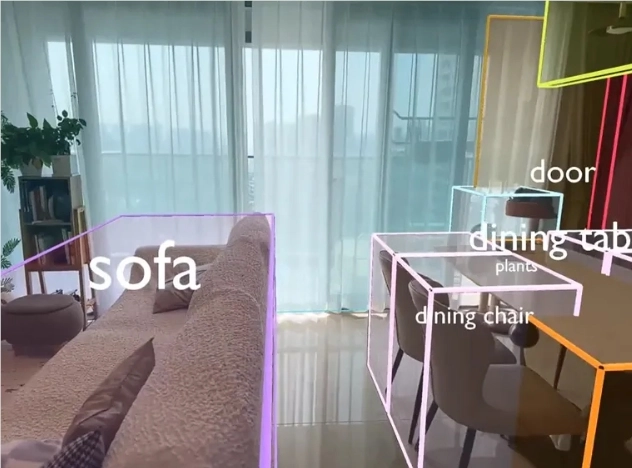
SpatialLM 的核心功能是将手机拍摄的视频转化为三维空间布局信息。用户只需用手机录制家中的布局,SpatialLM 便能生成一个详细的3D 场景,包括房间的结构、家具的位置和通道的宽度。这一过程大大降低了机器人训练的成本,提高了训练的效率。
在 GTC2025大会上,群核科技同时展示了他们的虚拟训练平台 SpatialVerse。这个平台结合了 SpatialLM 生成的数据,允许机器人在模拟环境中进行避障、抓取等训练,从而形成从认知到行动的完整闭环。简而言之,机器人通过这个系统不仅能 “看” 到空间布局,还能理解如何在这些环境中进行操作。
SpatialLM 的工作原理并不复杂。它利用 MASt3R-SLAM 技术将视频拆解为无数帧,提取出沙发、桌子等物体的细节并构建成点云模型。随后,模型将这些数据转化为结构化的3D 布局,记录下每个物体的关键信息,如尺寸和位置。与传统的训练方法相比,SpatialLM 不仅节省了时间和资源,还提升了机器人的空间认知能力。
这项技术的独特之处在于,它使机器人可以像人类一样理解和处理复杂的环境变化。无论是家庭生活中的日常物品还是工作场所的工具,SpatialLM 都能帮助机器人快速适应并执行任务。这种能力对于提升机器人在真实环境中的表现至关重要,尤其是在当前的具身智能领域,许多技术依然面临落地难题。
群核科技通过开源 SpatialLM 和 SpatialVerse,正在重塑机器人训练的未来,使其能够在真实世界中灵活应对各种挑战。
项目地址:https://github.com/manycore-research/SpatialLM