南洋理工大学研究团第一项名为“GaussianCity”的超大规模3D城市模型生成技术引发了不少关注,这款由研究团队开发的全新框架,不仅在生成速度上实现了惊人的60倍提升,还突破了传统方法在规模上的限制,支持无边界的3D城市生成。
这一技术成果已被CVPR2025(计算机视觉与模式识别顶级会议)接收,成为虚拟现实、自动驾驶和数字孪生领域的重大突破。
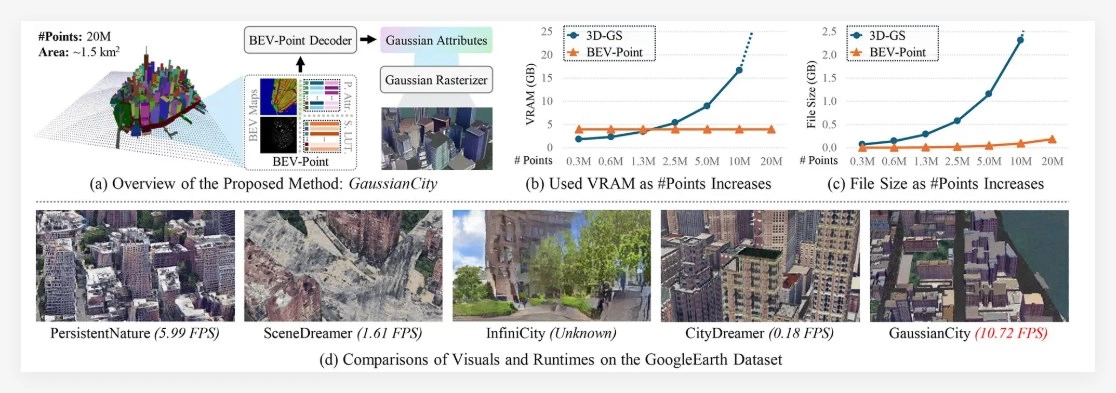
据了解,GaussianCity在生成无人机视角和街道视角的3D城市模型方面达到了最先进的水平。其渲染速度高达10.72帧每秒(FPS),相比现有的CityDreamer方案快了60倍。CityDreamer虽然在3D城市生成领域表现不俗,但其计算效率和规模扩展能力一直受到限制。而GaussianCity通过引入创新的算法设计,成功克服了这些难题。
GaussianCity的核心在于两大关键技术突破。首先,它采用了紧凑的3D场景表示方法“BEV-Point”(鸟瞰视图点),极大减少了显存需求,使得大规模场景生成不再受限于硬件资源。传统的3D高斯溅射(3D Gaussian Splatting,3DGS)技术在处理无限尺度城市时需要数十亿个点,动辄占用数百GB的显存,而GaussianCity通过BEV-Point保持显存使用恒定,实现了真正的无边界生成。其次,研究团队开发了空间感知的高斯属性解码器,利用点序列化器整合BEV点的结构与上下文特征,确保生成的城市模型既高效又逼真。
值得一提的是,GaussianCity的研发团队宣布,该项目的论文、代码和相关资料已全面开源。GaussianCity的出现为多个领域带来了新的可能性。在虚拟现实(VR)和增强现实(AR)中,它能够快速生成高质量的大规模城市环境,为用户提供沉浸式体验;在自动驾驶领域,GaussianCity可用于重建几何精准的3D场景,为训练和测试提供逼真的数字孪生城市;在城市规划和游戏开发中,其高效性和扩展性也将大幅提升创作效率。
项目入口:https://github.com/hzxie/GaussianCity