声明:本文来自于微信公众号 量子位 (ID:QbitAI),作者:Simon Zhai ,授权Soraor转载发布。
只用强化学习来微调,无需人类反馈,就能让多模态大模型学会做决策!
这种方法得到的模型,已经学会了看图玩扑克、算“12点”等任务,表现甚至超越了GPT-4v。
这是来自UC伯克利等高校最新提出的微调方法,研究阵容也是相当豪华:
图灵奖三巨头之一、Meta首席AI科学家、纽约大学教授LeCun
UC伯克利大牛、ALOHA团队成员Sergry Levine
ResNeXt一作、Sora基础技术DiT作者谢赛宁
香港大学数据科学学院院长、UC伯克利教授马毅
该方法名为RL4VLM,论文预印本已经上线,相关代码也已在GitHub中开源。
RL4VLM提出了一种新的算法框架,直接使用强化学习方法对多模态大模型进行微调。
其中奖励信息直接来源于环境当中,摆脱了RLHF中对于人类反馈的需要,从而直接赋予了多模态模型决策能力。

对于RL4VLM的意义,参与了这项工作的马毅教授这样说:
一方面希望大家对模型真实性能有更客观清醒的认识;
另一方面,也希望能建立一个平台,支持探索如何进一步提升模型性能。
那么,用这种方法微调出来的多模态大模型,都能让智能体学会哪些能力呢?
为了评估训练出的多模态大模型给智能体带来的能力,作者一共使用了两类物种评测任务:
第一类任务(a-d) 主要考验模型利用图像中的细粒度视觉信息做决策的能力,包括对于数字的识别能力和利用识别的数字进行逻辑推理的能力
第二类任务(e)主要考察多模态大模型在具身智能环境中的视觉语义推理能力。
具体来说,这五个任务分别是:
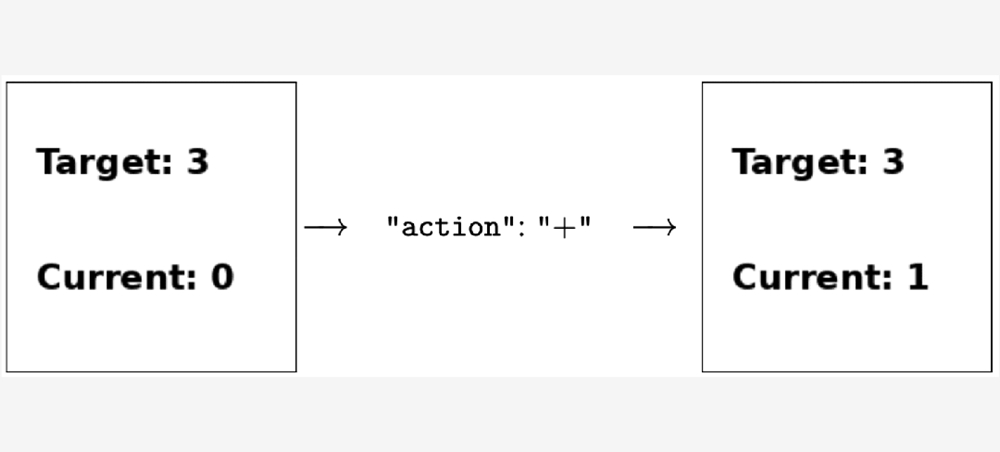
a.数轴(Numberline):模型需要通过输出“+” 或者 “-”,将当前数字移动到目标数字
b.简易12点(EZPoint):模型需要识别两张牌,并用加号和乘号运算“12点”
c.24点(Point24): 模型需要识别四张牌,并用加减乘除和括号运算“24点”
d.21点(Blackjack):模型需要通过牌面上的信息来决定“要牌”或者“停牌”
e.ALFWorld:一个标准具身智能环境
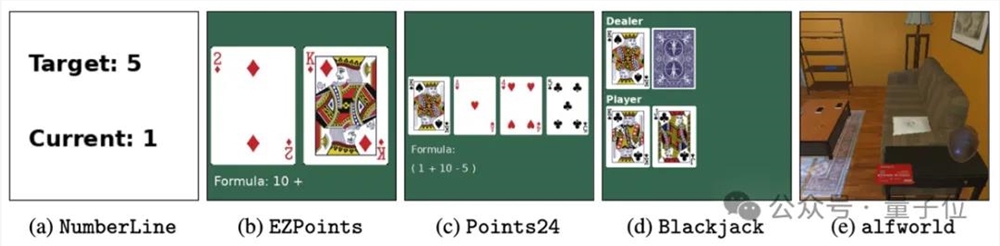
其中任务a-d为作者的原创任务,任务e的ALFWorld是微软等于2020年提出的开源具身智能任务集。
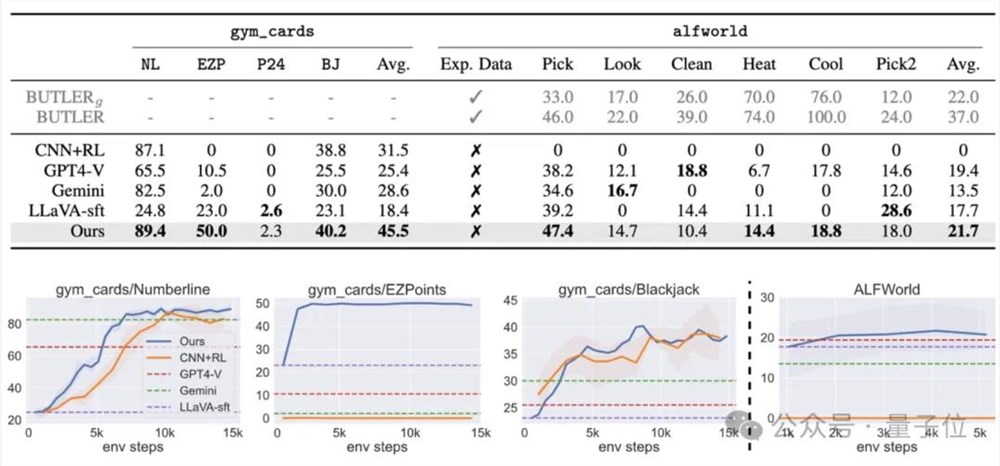
实验结果表明,直接使用强化学习微调7B的多模态模型之后,能使其在两类决策问题上的表现超过商用模型GPT-4v Gemini,同时也能超过传统的监督微调(SFT)方法。
而在ALFWorld的具身智能任务中,作者的模型也取得了最高的平均分,特别是在单物体拾取任务上表现尤为突出。
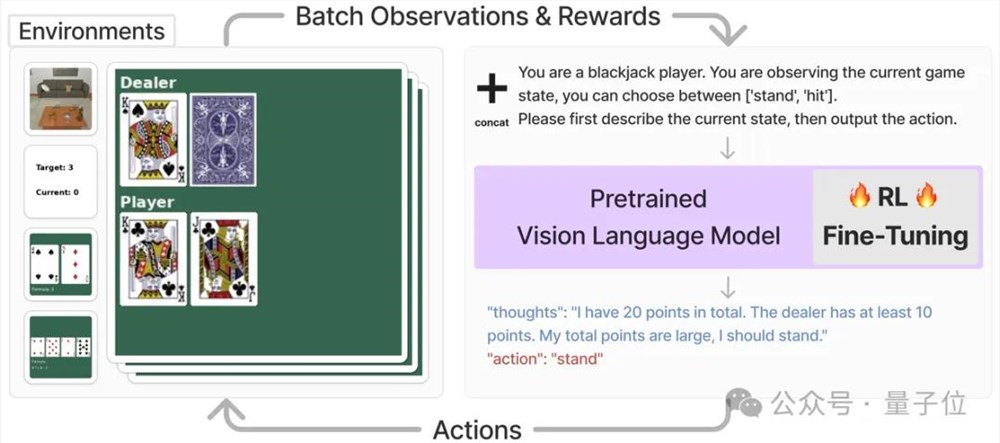
这套VLM智能体主要解决的是需要视觉识别和语言理解的任务,它的工作流程是这样的:
首先,对于每一个任务,系统会直接将该任务的当前状态,以图片和文字描述的形式输入多模态大模型,并要求模型输出一段思维链之后,再以文字形式输出要执行的动作。
最后将,动作信息会被输入进对应的环境并获得奖励值,该奖励值会被用来进行强化学习训练。
例如下图中,智能体在执行玩21点的任务时,系统直接要求多模态模型根据目前的状态,在输出思维链之后选择“停牌” (stand)或者“拿牌”(hit),然后直接将对应的动作输入到环境中,得到奖励函数值以及下一个状态。
为了能用直接将强化学习运用到多模态模型的训练中,需要对模型的输入和输出做一些调整,以适应RL训练框架中。
具体来说,作者将任务图像o和任务描述的文本v-in合并后,直接作为当前任务的状态s,即:
s = [o, v-in]
在获得了多模态模型的文字输出v-out以后,该框架直接将其中文字形式的动作(“action: {act}”) 转化为可与环境交互的动作指令a。
接下来把a输入到环境当中,就能获得奖励函数r,以及操作后的下一个状态。
在获得了来自环境的奖励函数r之后,文章利用PPO直接对整个多模态模型进行微调。
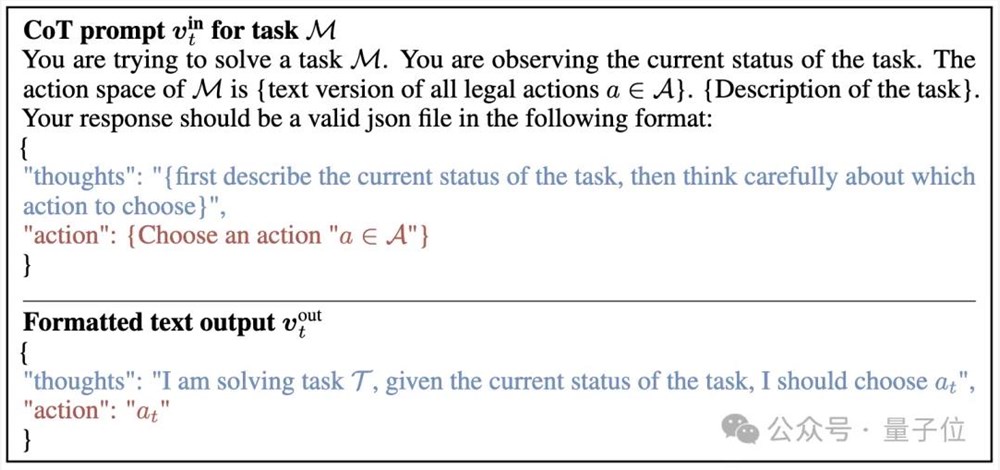
而从提示词上看,这项研究采取了如下的提示过程作为多模态模型的输入,并且给出了期望的输出形式:
(其中蓝色的部分是让模型生成思维链提示过程, 红色的部分是告诉模型以文字形式输出动作a)
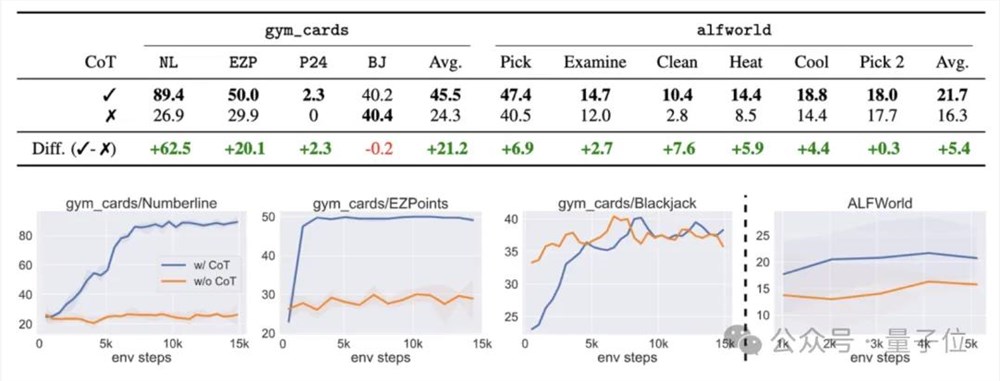
消融实验结果表明,如果这一过程中不采用思维链,则任务成功率会出现大幅下降。
论文地址:
https://arxiv.org/abs/2405.10292
GitHub:
https://github.com/RL4VLM/RL4VLM
—完—